Movella旗下的Xsens MVN是一种易于使用、经济高效的系统,可以在任何环境中捕捉人体的全身运动。该设备基于小型惯性传感器和磁力计的数据并结合先进的算法和生物力学模型开发而来。新发布的动作捕捉引擎不受磁场干扰,可以作为MVN Animate用于3D角色动画领域,或作为MVN Analyze用于人体运动捕捉领域。
本文中通过对比行走和跑步动作的光学动作捕捉数据和Xsens MVN 设备的惯性动作捕捉数据,并在Opensim中进行数据计算,以分析该设备的数据一致性。
MVN Analyze和MVN Animate引擎能够用于任何类型的动作捕捉,包括跑步,跳跃,下蹲,爬行,侧手翻等等,并且在任何环境中包括存在严重磁干扰的环境表现出高度的可靠性和一致性。
在过去的十年中,惯性动作捕捉系统应用越来越广泛,已经普及到从电影的角色动画,游戏,增强现实和虚拟现实,到生物力学,康复,人体工程学运动人体运动捕捉等各个方面。
与基于外部发射器和相机的其他动作捕捉系统相比,惯性动作捕捉不依赖任何外部基础设施,可以在任何地方使用。尽管惯性动作捕捉系统比其他动作捕捉系统有巨大的优势,但当前解决方案中固有的方向(和位置)漂移阻碍了惯性动作捕捉系统的进一步普及。通过校准过程完成传感器与人体环节的匹配,相应位置上的传感器数据进行计算,并将其应用到可缩放的人体生物力学模型上。
这三个组成部分都会对设备表现产生影响。首先,传感器匹配到身体环节的校准通常是通过要求受试者站在一个已知的姿势(例如n -姿势或t -姿势),并通过结合加速度计(倾角角)和磁强计(航向)的传感器读数来估计传感器的方向。具体来说,直接使用磁力计读数来获得航向是误差的主要来源,因为磁场干扰或磁强计校准误差严重影响总体精度。此外,受试者很可能(至少部分地)无法保持预定姿势,因此可能导致超过5度的定向误差。其次,单个传感器的方向通常通过整合来自加速度计、陀螺仪和磁强计的信号在传感器融合框架中获得。陀螺仪可以精确地跟踪方向的短期变化,而加速度计和磁力计则提供了长期的稳定性。精度取决于传感器校准和环境条件。倾角计算可能会因长期加速度而失真,而航向计算可能会因磁失真而失真,例如建筑物中的常见材料(钢结构、钢筋混凝土等)、家具和周围的电子设备等的影响。尽管单传感器定位跟踪的精度有了巨大的提高,但仅使用陀螺仪、加速度计和磁力计获得的精度仍受限。第三,当应用于广泛的学科时,生物力学模型的准确性有限。模型缩放的缺陷和传感器位置计算不准确是影响整体精度的另外两种因素。
在过去的几年里,Xsens花费了巨大的努力来创建一个新的运动捕捉引擎,旨在克服当前解决方案的主要错误来源,以提供具备高度准确性和一致性的解决方案。新引擎将所有惯性传感器的数据与先进的生物力学模型相结合,从而实现抗磁场干扰。此外,传感器校准过程不再依赖于来自磁力计的数据,因此可以在任何地方完成校准。尽管在当前版本中仍然使用预定义的人体缩放模型及校准姿势,但当前软件允许自定义人体模型大小。
本文介绍了Xsens MVN系统的组成以及配套软件的关键特性。通过与光学参考系统的比较说明新发布的动捕引擎的性能,以证明其准确性和一致性。
Xsens MVN是一个由硬件和软件组成的动作捕捉系统,每个软件都有特定的版本,以适应客户和市场的需求。MVN Analyze是生物力学分析的推荐引擎。特别是对于关节角度的分析,在reprocess HD引擎设置下建议使用No Level场景。我们使用步行和跑步的数据用来证明MVN软件的准确性和一致性。
步行动作
第一组数据集由8名健康的年轻参与者(2名女性和6名男性)组成,在实验室环境中以三种不同的速度(慢速、正常速度和快速)来回行走。使用MVN Link捕获数据,同时使用8摄像头Qualisys系统捕获光学数据进行比较。
本次使用OpenSim处理光学动作捕捉系统Qualysis获得的数据并与MVN Analyze计算的关节角度进行对比,以评估MVN软件的准确性。使用HD reprocess对数据进行No level场景下的计算,获取髋关节、膝关节和踝关节的屈伸、内收外展、内旋外旋动作的关节角度。光学数据使用OpenSim进行处理,其中有两个处理选项,一个是标准的步态2392模型,该模型中的膝关节和踝关节只有一个自由度,并包含距下关节。另一个是改进的版本,将膝盖和脚踝建模为一个具备三维运动能力的关节(OpenSim FDOF)。两种模型都应用了逆运动学对光学数据进行计算以获得各关节角度。
图1显示了MVN Analyze和OpenSim (FDOF和RDOF)计算Qualysis数据的结果之间的比较,其中列表示三个不同的关节角度,行表示髋关节、膝关节和踝关节。在图中可以发现MVN Analyze和OpenSim处理后Qualysis数据的关节角度之间的良好对应关系,这也反映在下表中呈现的RMS差异上。走路时的主要角度是屈伸角,这表现出良好的对应关系,特别是膝关节和踝关节的角度。但是有时可能会注意到MVN Analyze和OpenSim计算Qualysis数据的数值之间存在偏移,特别是髋关节屈伸和膝关节外展内收角度。
在一些文献中也观察到这种形状上的相似性和偏移量的存在,这可能归因于Xsens MVN中的受试者校准过称和光学系统的标记物放置位置的不同导致的。
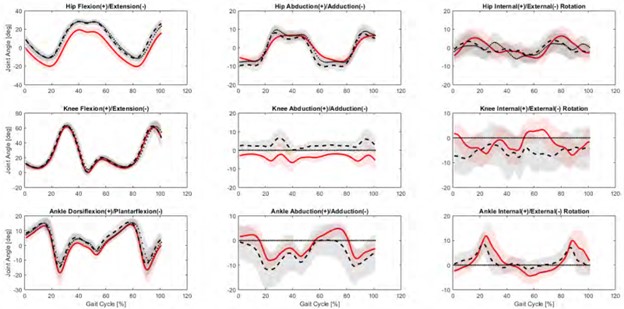
图 1:三种处理模式时在正常速度下行走时双侧下肢髋关节、膝关节和踝关节的角度:MVN Analyze(红色实线);OpenSim RDOF(黑色点线);和OpenSim FDOF(黑色虚线)。对所有受试者的步态周期进行时间归一化和平均。每个角度的标准差用半透明区域表示。
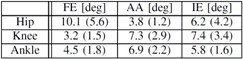
表1:行走过程中MVN Analyze与opensim fdof处理Qualysis数据结果的RMS差异(平均值(标准差)表。
在Xsens MVN中,受试者在已知的姿势下校准,被要求站在N姿态或T姿态(如图2所示)。在此静态位姿中,假设身体部分与参考位姿对齐,而来自光学的静态位姿是直接使用附着在骨标记上的标记位置测量的。几项研究表明,站立姿势时节段的偏移和变异性与观测到的偏移相似,以及由于标记放置的缺陷而估计的运动学偏移。
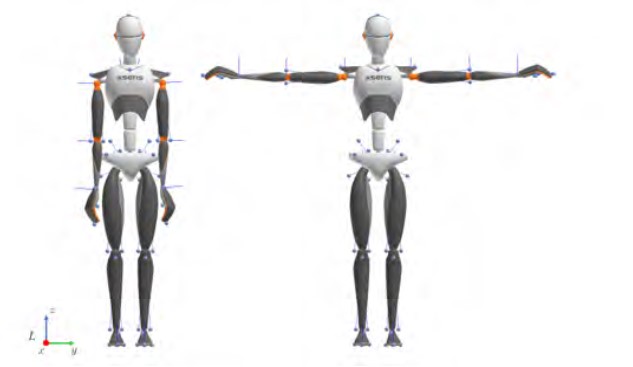
图 2:Xsens MVN人体模型的n型姿态(左)和t型姿态(右)。在t型姿态中,所有身体环节坐标都与左下角所示的公共坐标对齐。
尽管如此,不考虑参照系统的差异,该系统能够可靠地跟踪不同动作阶段的运动学数据,例如评估临床相关的功能活动。为了进一步支持对髋关节屈伸和膝关节外展/内收所观察到的偏移原因的推测,我们不再使用MVN软件中要求的N型姿态,并直接使用OpenSim中的静止姿态模型作为标定姿态,从而更准备比较两种不同系统的数据差异。在这种情况下中,如图4所示,MVN Analyze和OpenSim计算结果的差异较小。具体来说,髋关节屈曲/伸展的平均RMS差异为4.8±2.9而不是10.1±5.6,膝关节外展/内收的平均RMS差异为4.4±1.7而不是7.3±2.9。

表2:使用Opensim静态模型校准后,MVN数据与光学数据计算后对比
从图1中可以很容易观察到,MVN Analyze和OpenSim FDOF模型是以相似的方式计算膝关节和踝关节的角度。这个结果暗示与MVN Analyze和OpenSim FDOF相反,OpenSim RDOF模型可能以一种过于简单的方式建模这些关节,导致对实际关节运动的计算不准确。
综上所述,观测到的差异与文献中所报道的差异一致。在对初始姿势进行校正后,三个关节在矢状面上的角度差异低于5度。表1和表2中矢状面外的角度差异稍微略大,但从图1中可以看出,以半透明区域表示的MVN Analyze和OpenSim FDOF模型矢状面外关节角度的方差与观测差异及其他研究结果一致。最重要的是,在标准的OpenSim RDOF模型中,膝关节和踝关节的一些角度根本没有被计算出来。
跑步
第二组数据由10名健康的年轻运动员组成,他们在跑步机上以三种不同的速度(10、12和14公里/小时,持续3分钟)跑步。使用MVN Link 采集数据,并在MVN Analyze中进行No Level模式的HD再处理。本组的目的是显示在更具有挑战性的运动(跑步)和磁场干扰(跑步机)的环境中,检测数据的一致性。
图3是具有代表性的受试者右侧下肢角度曲线。图中显示了受试者以12公里/小时的速度跑步3分钟时的三个关节角度,以及每十秒为间隔计算的平均关节角度。
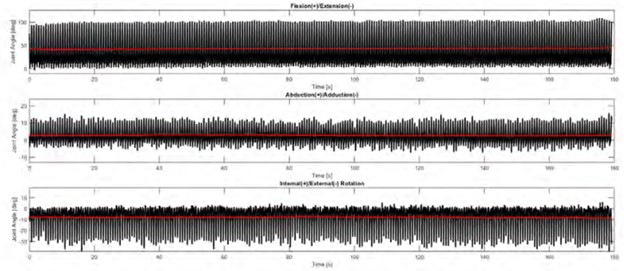
图3:在跑步机上跑步时,右膝关节角度为黑色(屈/伸,外展/内收,内/外旋)。红线显示的是在10秒内的平均关节角度。
可以清楚地看到,在具有挑战性的磁干扰环境中,关节角度被持续跟踪。左侧下肢角度曲线及其他受试者双侧下肢的曲线一致性与该曲线一致。
一致性也得到了图4的支持,图中显示了所有30次试验中右腿每个平均关节角度的散布图。试验是按3种不同的速度排序的,不同受试者数据之间通过竖线隔开。
图7
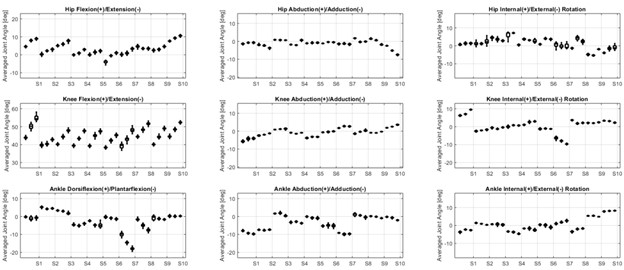
图4:在所有30次跑步试验中,右腿臀部、膝盖和脚踝的平均关节角度的散布图。试验是按每个受试者(S1 – S10)的3种不同速度(10、12和14公里/小时)排序的,不同受试者的数据之间用竖线分隔。框边表示第25百分位和第75百分位,线表示中位数。直线延伸到不被认为是异常值的最极端数据。
尽管每个方盒的位置(y值)可能会因受试者和速度的不同而有所不同,但每个盒子的体积很小,这表明平均关节角的值几乎没有分散。总的来说,分析表明在包括10位受试者总共超过90分钟的跑步得到的整组数据中,关节角度计算具有一致性。
注意,如果角度计算受到磁畸变的影响,数据的不一致将表现为角度模式随时间缓慢变化。同样地,平均值也发生变化,导致图4中盒子尺寸增大,短直线变长。
本文介绍了新发布的Xsens MVN,并将MVN Analyze引擎的性能与参考文献进行了比较,基于光学数据,结合OpenSim中的两个逆运动学模型,对不同的健康受试者行走速度的运动学数据进行计算。
此外,通过处理三种不同速度下的大量跑步数据和分析下肢关节角度,评估了MVN Analyze数据的一致性。与OpenSim计算的数据的比较结果总体与文献一致。矢状面角度的均方根差小于5度。需要注意的是,标准的OpenSim RDOF限制了膝盖和脚踝处的角度,因此不能估计矢状面以外的角度。然而,在没有这些约束条件的OpenSim模型中,这些角度与MVN Analyze表现出了良好的对应关系,表明了估计角度的有效性。
对包含超过90分钟跑步数据的完整数据集的分析显示,在具有挑战性的磁场环境中以不同的速度进行跑步时,髋关节、膝关节和踝关节的关节角度计算具有一致性。
新的引擎能够在任何环境中可靠地跟踪人体运动学。大量的身体环节位置、关节角度、速度、加速度及更多定量数据可以通过该惯性动捕系统获得,从而可以得到其他相关的指标。因此MVN 惯性动捕系统可以非常可靠高效的应用在体育健康、康复及人机功效等不同领域。