关于Xsens
Xsens是3D运动捕捉技术和解决方案的全球领导者。 我们提供一流的系统,用于导航,控制和检测复杂的工业&自动化环境中的运用。从自动驾驶汽车和无人机到仓储和物流,Xsens产品都可以提供高精度的准确姿态数据,产品即插即用,灵活可配置性并具有超高性价比。
Xsens是传感器技术,惯性传感器模块和传感器融合算法的先驱。 我们的惯性传感器模块(MTi)产品系列基于20多年的研发、实践经验和不断创新-并提供全球全天24小时技术支持。
想继续了解吗? 联系我们-咨询更多内容
专业经验满足客户需求
借助Xsens的3D运动捕捉解决方案,您可以将尖端科学和工程技术与实际解决方案结合起来,从而满足您的特定应用和需求。当今市场上可用的惯性传感器技术大部分起源于Xsens,我们在该领域拥有近200项专利。我们通过灵活的、全天候的在线知识库和社区论坛与您共享扎实的基础知识和众多客户共同关心的话题:将我们技术团队的知识分享给您来帮助克服现实中遇到的技术难题。

可靠的质量,实在的价格
Xsens产品解决方案的性价比为惯性传感器模块市场树立了新的标准。 借助Xsens,即使在复杂磁场环境干扰条件下,您也可以继续可靠的惯性姿态数据–这是基于20年来软件和滤波器不断改进的传感器融合算法。 我们的产品都经过内部生产测试、出厂标定校准,并进行了全温度范围的补偿校准。 产品范围从基本的惯性测量单元(IMU)-由于其多功能性而经常用作构搭建系统模块- 到高精度差分定位(RTK)的解决方案,都可提供无与伦比的高精度定位姿态数据。
即插即用的可配置性
在您的应用场景中是否会遇到许多不同技术组件的要求,从而使兼容同步成为一种挑战? Xsens产品具有高度的可配置性,可以将它们集成到独有的开发系统中,并提供(数据)同步选项。 我们的即插即用模块(当今市场上普遍通用的产品组合)可提供三种不同的外形尺寸,并支持8种接口,因此您可以放心地根据自己的需求和规格进行构建。 节省时间和金钱,同时在为您的应用场景开发完美解决方案时享有最大的设计自由。







什么是惯性传感器?
惯性传感器或惯性测量单元(IMU)是一种电子设备,可以监测3D加速度,角速率或2D旋转速率以及(移动的)物体的磁场。它使用加速度计,陀螺仪和磁力计来对物体(例如,无人驾驶飞机或自动驾驶汽车)的运动的校准测量。 IMU技术广泛应用于无人机,无人车,机器人技术,数字地图绘制,飞行试驾和仓储等领域。 对于诸如此类测量的应用,在操作后必须要有数据的情况下,IMU也可以连接到内部数据记录器。
阅读有关我们IMU的更多信息
在更高级别产品上,我们增加加了传感器融合技术,以便基于IMU提供的数据进行方向计算。 根据所使用的技术,既可以测定俯仰、翻滚和非参考偏航姿态,也可以测定俯仰、翻滚和参考偏姿态航。 在第一种情况下,偏航输出相对于零点,即初始化滤波器或发送最后的航向复位命令时的偏航方向。 在第二个更高级的应用中,偏航输出被引用为“真北”。
在先进的水平上,3D运动跟踪将运动数据以及侧倾,俯仰和偏航计算与3D定位,3D速度和全球导航卫星系统/惯性导航系统(GNSS / INS)数据结合在一起。 这意味着合并来自不同来源的大型数据集以获得更丰富,更精确的结果。 在高精度应用中,例如地籍测量或精确农业,传感器融合与实时运动(RTK)定位相结合。 这种卫星导航技术可以将卫星定位数据的精度提高到厘米级。
阅读有关我们GNSS / INS系统的更多信息
产品应用
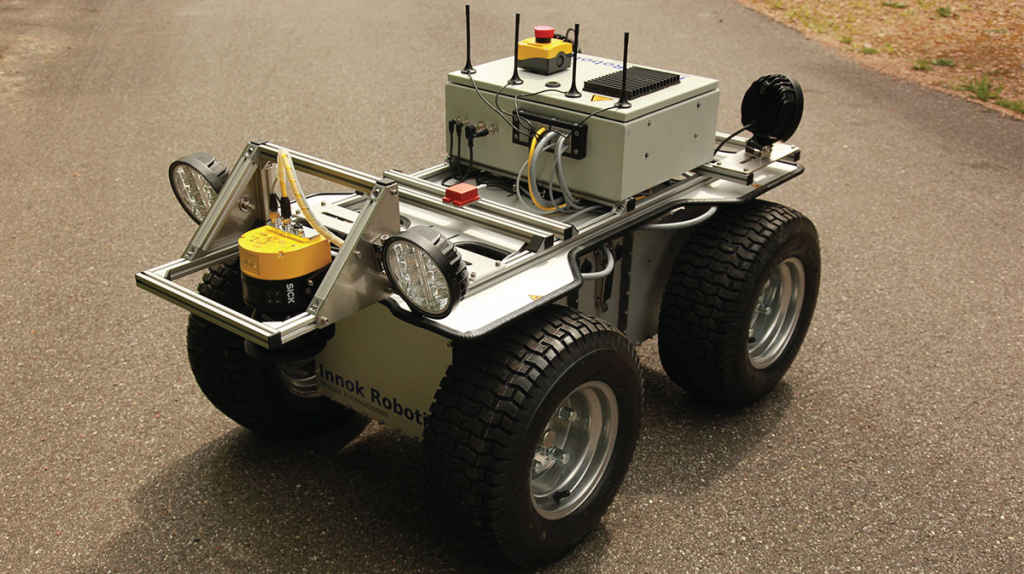
自动驾驶汽车
在旅行和运输中,自动驾驶汽车的应用需求正在不断上升。 从无人驾驶卡车到自动赛车,移动机器人和3D测绘应用到火车姿态监控技术,应用范围很广且技术要求也很多。 Xsens的解决方案-我们的MTi产品系列可以在任何这些领域中使用。 借助控制器局域网(CAN)接口以及传感器内置或外置GNSS接收器,我们的产品可以为室内,室外和地下应用都提供完整的惯性导航及姿态数据。


海洋和港口
海上和港口的应用必须考虑到许多不同的因素,包括水和空气运动的高度有变化,可靠性和高精确度在该领域至关重要。 例如,水下机器人,自动驾驶船,在流动的水面上保持船舶的静态稳定性,用于照相机或天线的稳定平台,测量海洋或水下运动,在高光谱细节上绘制海底图或海上和港口监控系统。 Xsens的MTi系列产品强大的软硬件以及抗磁干扰算法使它们成为海上和港口惯性传感器技术应用中优秀的选择。
航天航空和无人机
随着航空航天和无人机应用的精度要求不断提高,我们的产品在这个不断增长的市场中得到了大量的使用,其应用范围从测量、检查到飞行测试,航拍摄像头的万向控制以及海上风能平台的稳定控制。 无论您需要低功耗、低延迟、高速处理还是轻巧的惯性传感器,Xsens MTi均可适用于任何航空,航天或太空应用。


仓储物流
得益于机器人技术、自动驾驶汽车、传感器技术和物联网(IoT)、仓储和物流的不断智能化,惯性导航在工业4.0的这一令人兴奋的过程中扮演着重要角色,我们的产品可满足该应用领域中的所有特定需求。 我们的(VRU)就是一个例子,它提供了俯仰、翻滚和航向的姿态数据输出,而且无需参考地球的磁场,这是对磁场干扰较大的位置(例如室内和地下仓库)的理想解决方案。
其他应用
我们还为其他很多不断增长的行业和应用提供解决方案。 除了上述提及的内容外,还包括:
- 农业和林业
- 汽车测试
- 工程机械
- 动中通
- 数字测绘
如果您有兴趣探索此处未提及的应用领域中惯性导航技术的潜力,请与我们联系。 我们的专家团队渴望并有能力可以运用当前先进的技术来助力您的产品开发。
是否有您感兴趣的应用领域? 请阅读更多其他的应用案例。

产品功能
适合每种不同应用的理想选择-在Xsens,我们旨在为惯性导航的每种应用提供适合的解决方案。 我们的产品范围涵盖了所有需要的功能,从基本的3D惯性测量到基于传感器融合算法的精确姿态和高精度卫星定位。
惯性测量单元
惯性测量单元(IMU)是一个独立的系统,可提供经过校准的线性加速度和角速度原始数据。 该系统通常使用三轴陀螺仪和三轴加速度计。 IMU可以是万向接头,也可以是捷联装置,在传感器/车身框架中输出角速度和加速度的积分量,传感器在文献中通常被称为速率积分陀螺仪和加速度计。 IMU通常作为一个单元被使用在更复杂的系统。
IMU的性能差异范围相当大。 在Xsens,我们在价格和性能之间保持竞争力,始终保持高品质、坚固耐用的外壳以及易于配置的特点,同时具备数据同步选项和严格产品生命周期管理。
垂直参考单位(VRU)
垂直参考单位(VRU)测量俯仰、翻滚和(未参考)偏航。 其传感器融合数据-可以包括航向和其他类型的数据,具体取决于应用场景所需的要求水平-用于在各种情况下进行动态定位。 由于VRU不依赖于磁性参考,因此它们是具有强磁干扰情况下的理想解决方案。


姿态和航向参考系统(AHRS)
姿态和航向参考系统(AHRS)通过将陀螺仪、加速度计、磁力计数据融合来提供3D姿态和方向。偏航角输出以True North为参考:通过传感器数据融合,将陀螺仪产生的漂移通过参考矢量(即重力和地球磁场)进行补偿,以减少漂移的影响。 磁力计的功能使AHRS与VRU区别开来,与仅集成陀螺仪并且高度依赖于陀螺仪偏置稳定性的传统IMU(惯性测量单元)相比,它使AHRS成为更具成本效益的解决方案。和我们VRU一样,我们AHRS产品也是客户非常需要的ISM产品之一。另一个AHRS的优势是多功能性:高性能Xsens AHRS可以轻松地改为VRU或IMU来使用。
全球导航卫星系统/惯性导航(GNSS / INS)
如果您正在寻找一种可以与外部接收机定位数据相结合的AHRS产品,那么您将对我们的惯性导航系统(GNSS / INS)非常感兴趣。常规INS使用来自IMU的角速度和加速度数据来计算一段时间内的相对位置-这意味着如果不提供外部参考,它将从其真实位置漂移,从而影响使用的效果。
相互补强的GNSS、INS和AHRS技术的结合使我们能够为您提供功能更加强大的惯性导航产品,提供最佳的性能和最少的漂移,即使在暂时无法收到GNSS位置的场景中(例如在隧道或桥梁下)也可以继续工作。
GNSS / INS产品在许多应用领域中发展迅速,包括需要定位数据的无人机,汽车测试,自动驾驶汽车和(港口)卡车,海洋,海面和港口应用。


实时差分定位(RTK)
实时差分定位(RTK)是一种卫星导航技术,用于提高从卫星定位系统获得的位置数据精度。 传统的GNSS接收器会测量信号从卫星传输到接收器所需的时间。 使用四个或更多卫星信号并基于至少三个已知点(三边测量)进行定位将使接收机能够计算其位置。 但是,这些信号在通过电离层和大气时会失真,从而影响所计算的位置精度(2至10米)。 RTK通过使用来自基站的实时校正来解决此问题,基站知道其固定位置,因此能够估计接收信号的误差。 然后,该校正信号从基站发送到RTK接收器。
垂直参考单元(VRU)(需要添加该模块吗?)
姿态和航向参考系统(AHRS)
姿态和航向参考系统(AHRS)通过综合陀螺、加速度计和磁力计数据显示三维方向。安装传感器后,陀螺积分数据偏差通过重力和地球磁场等参考矢量进行补偿。
传统高级惯性测量单元(IMU)仅集成陀螺,受其偏置稳定性影响大。相比之下,AHRS是一套可以准确显示航向的经济实惠解决方案。


GNSS/INS
产品
工业级惯性传感模块(MTi):从入门级到性能最高级,Xsens可以在各个级别提供惯性姿态技术。 我们的(MTi)产品系列是逐代依次开发的,其中MTi-1系列提供最基本的惯性姿态功能,而MTi-100系列使用了更优化的融合算法将惯性姿态与卫星定位技术融合。
MTi 1-系列
MTi 1系列是我们的入门级产品, 尺寸仅为12mm x 12mm,提供了最小的外形尺寸。 MTi-1可表贴安装,通常用于大批量生产应用。
![XsensMTi1-series[1]](https://www.xsens.cn/wp-content/uploads/2021/02/Xsens20MTi201-series1-768x512.jpg)

MTi 600-系列
MTi 600-系列是我们工业级系列中功能最丰富的产品,对于几乎所有类型的工业应用而言,它都是可靠的选择。 最新的MTi 600-系列使用了优化的传感器融合算法,并集成了技术先进的硬件。


MTi 100-系列
MTi-100系列是Xsens的最高端产品。 这款坚固耐用的多合一传感器配置了先进的传感器融合算法,为MEMS的INS,AHRS,VRU和IMU产品的可靠性树立了行业标准。


产品选型工具
为了帮助您选择到合适的产品,我们新建了推荐工具, 仅需要回答三个问题,我们就可以为您推荐适合您应用的Xsens产品。
MT 软件套件
MT软件套件包含:
- MT SDK与相关的软件开发工具
- XsensDeviceApi.dll(XDA)– DLL C接口
- XDA源文件– C,C ++wrapper
- MATLAB,Python,C ++,C#,ROS和Nucleo开发板的示例源代码
- Magnetic Field Mapper executable GUI)和MFM SDK
- 使用手册