在美国卡内基梅隆大学 (CMU) ,工程和计算机科学专业的学生有着不同于寻常的学习体验。除了讲座、研讨会和书面作业之外,学生们还有机会将他们所学的新知识应用在一系列尖端技术的实际产品开发中。
CMU举办了一个成功的机器人项目,其中一个学生团队开发了一款海洋机器人,参加了由非营利教育组织RoboNation举办的国际水下机器人大赛(RoboSub)。CMU团队所开发的海洋机器人-TartanAUV目前已发展到第二代,新设备在第一代的基础上进行了重大技术升级,这标志着CMU首次进入RoboSub竞赛角逐。

比赛需要非常精确、实时的水下3D位置和方位信息。第二代设备升级的一个关键点是集成了Xsens MTi-200 VRU,即使在强磁干扰的情况下也能提供准确、同步的方向和航向输出。
3D导航:具有挑战性的水下任务
一年一度的RoboSub竞赛要求各学生团队开发一种自主水下航行器 (AUV),然后对其安排各种任务来进行测试,这些任务模仿了AUV在现实世界中运行所需的行为,包含了视觉、机械和逻辑维度。AUV需要在一个大型水池中进行水下导航,识别门等物体,计算任务内部和任务之间的路径,并执行特定的要求,例如翻滚。所有这些要求需要在15分钟内完成。对参赛者的评判标准是他们的AUV对于任务的完成度,以及执行任务的风格。
由于潜艇在水下导航,因此无法使用卫星导航 (GPS) 信号来跟踪其位置, 这意味着它必须执行航位推算,通过连续测量其速度、姿态和航向来从已知起点计算其3D位置。
CMU团队的工程负责人Theodore Chemel表示,团队所开发的名为“信天翁”的TartanAUV,在第一次迭代的过程中进行性能分析,并确定了一个重大的改进机会。“信天翁因为航位推算计算中的漂移量而丢分,导致AUV偏离了理想路径并减慢任务完成的速度。因此,新一代TartanAUV-KINGFISHER的首要任务是改进制导、导航和控制 (GNC) 系统。”
计算能力对AUV的性能没有限制:升级后的Kingfisher AUV包含了强大的新型Nvidia Jetson AGX Xavier单板计算机。这提供了充足的计算带宽来执行高度复杂的同步,和多个导航传感器输入的融合。这让CMU的学生工程师们有机会采用两种新的硬件组件,它们结合起来极大地提高了导航性能。
其中一种组件是Xsens MTi-200 VRU。Theodore Chemel说到,MTi装置内部的高度集成对TartanAUV团队来说是一个很大的吸引力。“MTi-200内的软件在纠错和同步由该装置的加速度计、陀螺仪和磁力计产生的3D测量方面做得非常出色,因此它产生的方向数据输出非常准确。在最大400Hz的输出数据速率下,其精度满足了我们的要求。
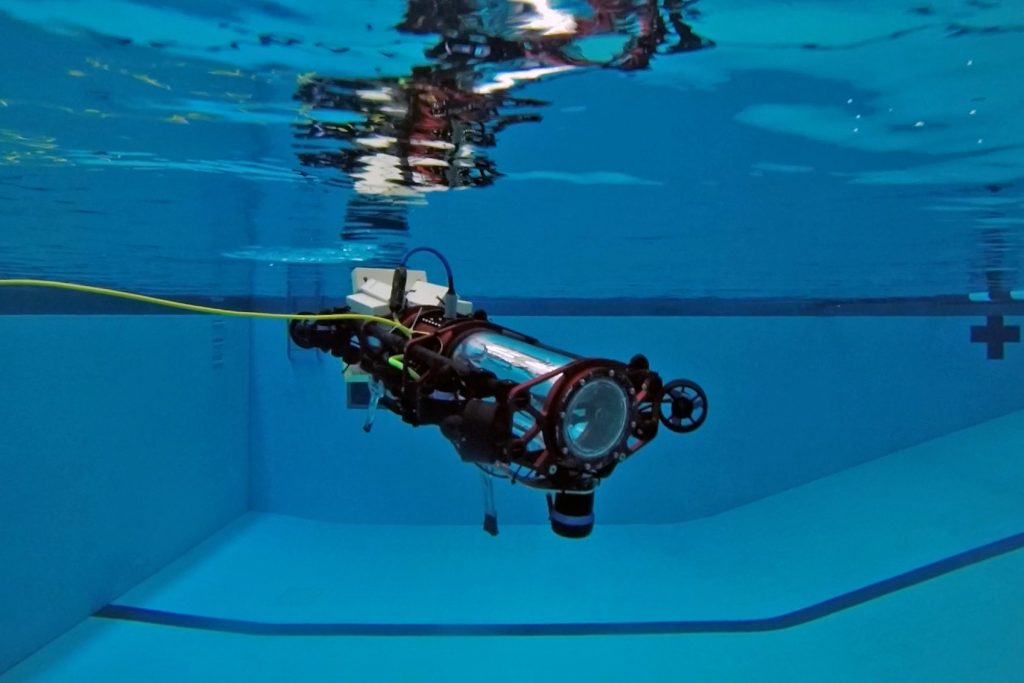
MTi-200的另一大优势是对磁干扰的高抗扰度。RoboSub的比赛通常在大型室内游泳池举行,在过往的比赛中曾有AUV因为水池上方巨大的金属龙门架,而受到来自钢材的干扰并严重影响了先前位置传感器提供的航向测量。
而MTi-200则没有这样的问题。Theodore Chemel说到,在选择MTi-200之前,CMU团队在一个非常大的磁铁附近测试它的性能。他表示VRU的表现“坚如磐石”,Xsens的主动航向稳定 (AHS) 功能非常有效地滤除干扰并在所有环境中提供准确的航向测量。
导航硬件的第二个创新是添加了Teledyne Pathfinder Doppler Velocity Log (DVL),这是一种声学传感器,可提供非常准确的线速度测量,但提供的分辨率却非常低(10Hz)。因此CMU团队使用Jetson计算机的功能来融合和同步IMU和DVL输出:IMU测量填补了低频DVL测量之间的空白。MTi-200的高精度时钟提供主计时信号,触发DVL执行带时间戳的速度测量。
升级后的AUV提供了有希望的性能改进
CMU团队在今年RoboSub竞赛的准备中,第二代TartanAUV-Kingfisher的大量硬件升级的结果看起来很有希望。Theodore Chemel表示:“对AUV性能的真正考验是它在比赛中执行指定任务的时候,但我们的测试表明GNC系统现在完全按照我们想要的方式运行。在8分钟的运行测试中,肉眼几乎看不到与绘制路径的偏差。多亏了MTi-200和DVL,我们对新型TartanAUV在3D中执行航位推算的方式感到非常满意。”