当救援人员前往失火或危险建筑物中营救受害者时,他们所面临的是未知的救援环境:他们不知道自己将面临什么危险,也不知道与被害者之间的障碍在何处。在发生火灾或地震时,救援人员通常会短时间内在建筑物中迷失方向。
如果急救员、士兵等救援人员能在受灾建筑物内获得导航定位的帮助,他们就能更快更安全地开展救援行动。但是室内接收GPS会面临无信号或信号不稳定的情况,那么在不依靠卫星定位的情况下,如何为室内、隧道或地底的人员进行追踪定位?
位于加拿大渥太华的卡尔顿大学应政府要求接受了这项挑战,由该大学嵌入式和多传感器系统实验室 (EMSLab) 的专家团队负责。他们开发这个项目的核心是一个独特的运动跟踪器:Xsens MTi-300 AHRS ,体积虽小但重要性高,为操作复杂的无线电和光学传感器阵列提供了安全的基础。通过这个传感器,操作人员能在任何建筑物中绘制三维地图。
如何在没有地图的情况下导航
卡尔顿大学这项研究项目的任务非常困难:在没有地图或指引计划的情况下,对进入建筑物内的人员进行准确的实时三维环境动作跟踪。
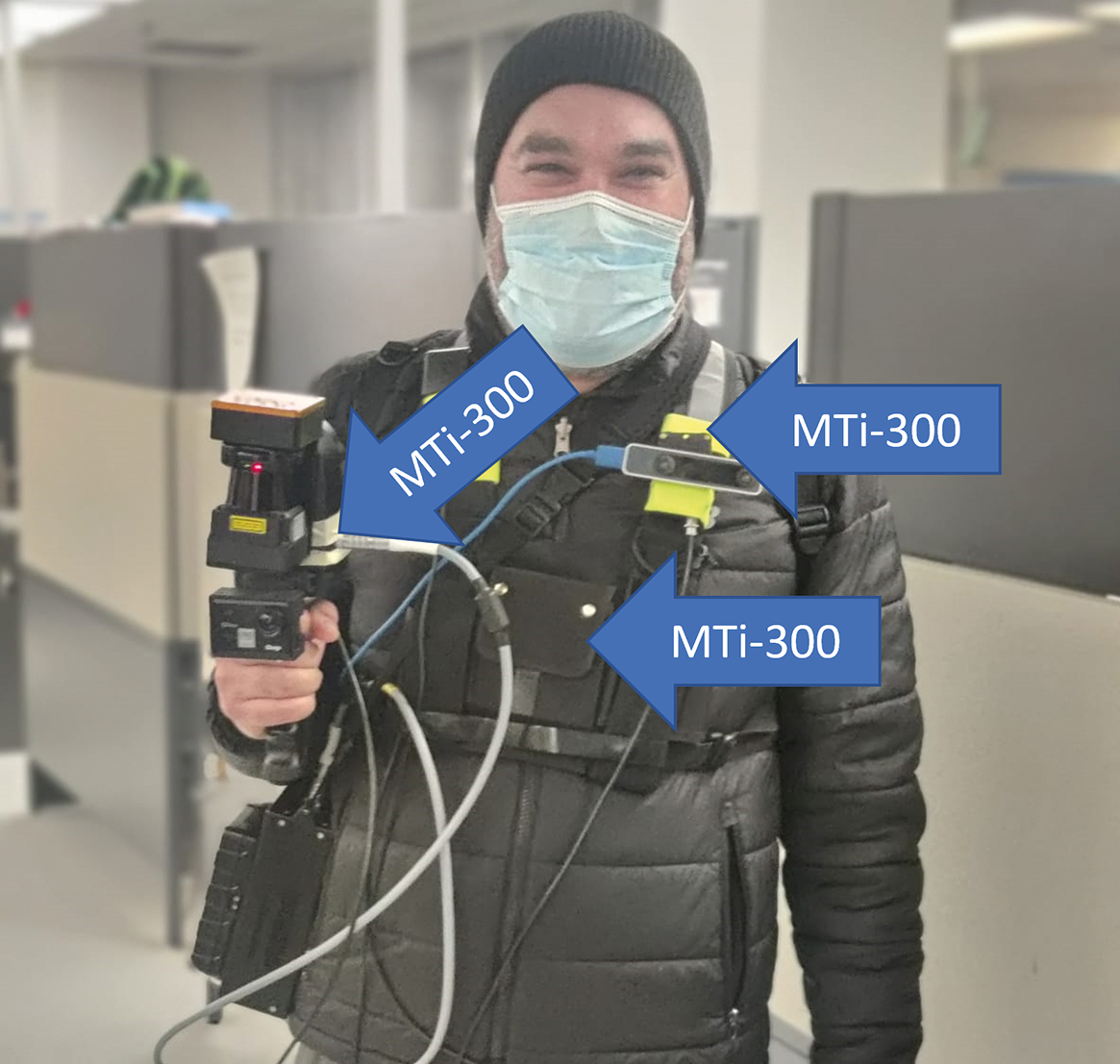
为了实现这个目标,卡尔顿大学研究小组开发了一款便携式设备,由每个被追踪的人携带。该设备由一组协同工作的无线电、光学和运动传感器组成。项目负责人-卡尔顿大学系统与计算机工程系副教授Mohamed Atia说:“为了跟踪人员在三维空间中的位置,我们制作了一个可单人携带或佩戴的多传感器设备。我们开发的系统由一个视觉相机、一个用于测距和目标检测的LiDAR激光传感器以及一个超宽带(UWB)接收器组成,该接收器通过采集UWB信标来定位三维空间中操作员在建筑物里的位置。”
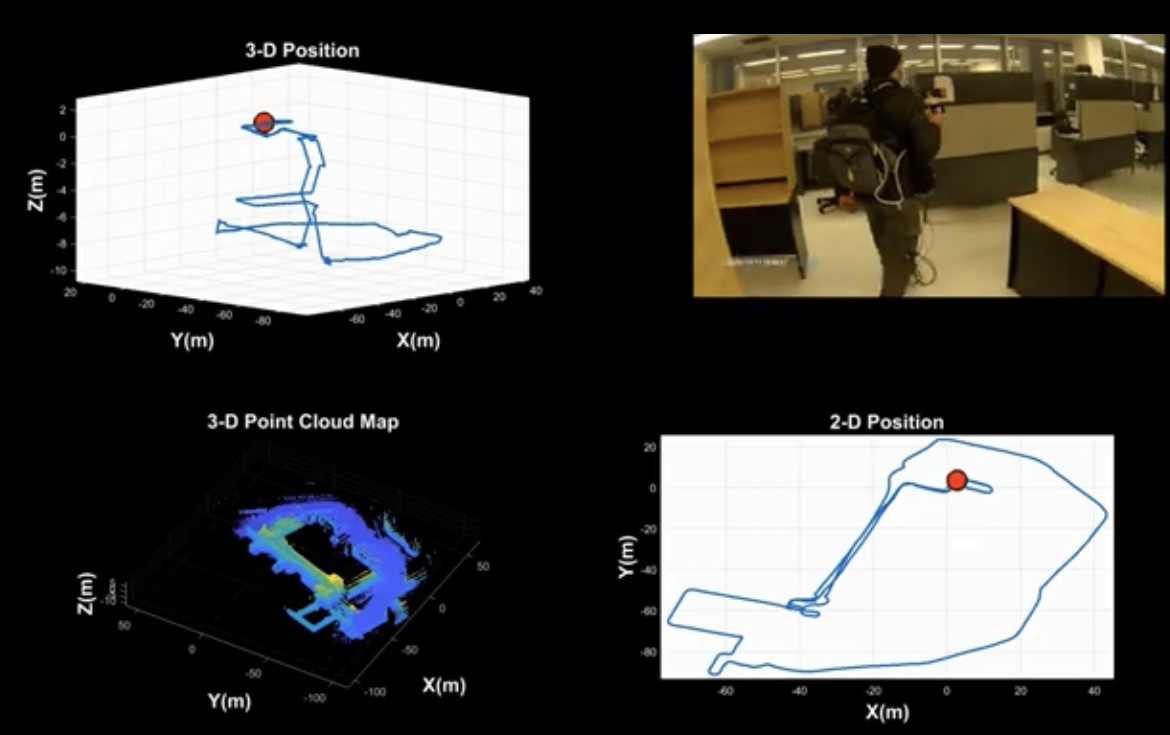
当这些技术结合起来,便能构建一个显示障碍物(例如墙壁、窗户、门和地板)的三维多层地图,并将载体定位在地图内。
实现该系统的最大技术难点是如何整合多个传感器的数据——即传感器融合的过程。由于卡尔顿大学开发的系统可佩戴或携带在身上,当操作员走路、爬行或跑步时,系统会在三维空间中不断上升、下降、旋转和倾斜。如果未经校准,这种俯仰、翻滚和偏航运动会使激光雷达、相机和UWB的测量数据彼此不一致,并且会随着时间的推移导致输出数据的偏差。
解决方案:稳定、准确的三维参照系,由三个MTi-300 AHRS组成。每个MTi-300 AHRS分别固定在LiDAR传感器、摄像头和UWB接收器上,测量每个传感器的滚转、俯仰和偏航位移,精度达毫米级,从而能够对传感器的输出进行实时连续补偿。
Mohamed Atia说:“对AHRS的关键要求是准确性和稳定性。在任务过程中,AHRS提供的三维参照系里即使是微小的误差也会迅速放大,因此我们要求所选择的AHRS能提供精准的测量,随着时间和温度的变化仍能保持其准确性,且漂移几乎为零。为了适应设备的便携性,它还需要体积轻巧。”
卡尔顿大学的系统还有一个巧妙的技巧:操作员佩戴同样来自Xsens的MTw Awinda无线动作捕捉系统,该系统能识别动作类型,例如运动和爬行,并在没有UWB信号的情况下进行航位推算。Mohamed Atia表示,无线技术是Awinda产品的一个重要特性,因为它使SLAM系统更易于穿戴。他补充道,“MTw Awinda系统还执行同步数据采样,精确到±10µs,这为我们融合系统中所有其他传感器提供了时间基准。”
拯救生命的创新
卡尔顿大学的便携式系统在早期的现场试验中证明了从原则上来说,准确可靠的SLAM可以在任何没有卫星定位信号的室内立体空间中发挥作用。Mohamed Atia的期望是,经过进一步改进,这项技术有朝一日能助于拯救生命。“在工业或紧急服务环境中,能够准确地了解建筑物内人员的位置至关重要,”他说。“当救援人员受伤或寻求帮助时,他的同事们能知道其位置,因此可以准确地在需要的地方和时间部署人员。在建筑火灾或战场等高压环境中,速度可以挽救生命。我们的技术以MTi-300为核心,使受灾人员能够更快地被找到并获得救助。”